
AR drone control with collision avoidance
Achieving autonomy in Micro Air Vehicles is challenging due to their limited computational power and sensing capabilities. Integrating user-worn AR hardware with these MAVs allows us to bridge this gap. This enables drop-in environmental awareness, intutive interaction and multi-drone operation.
View Project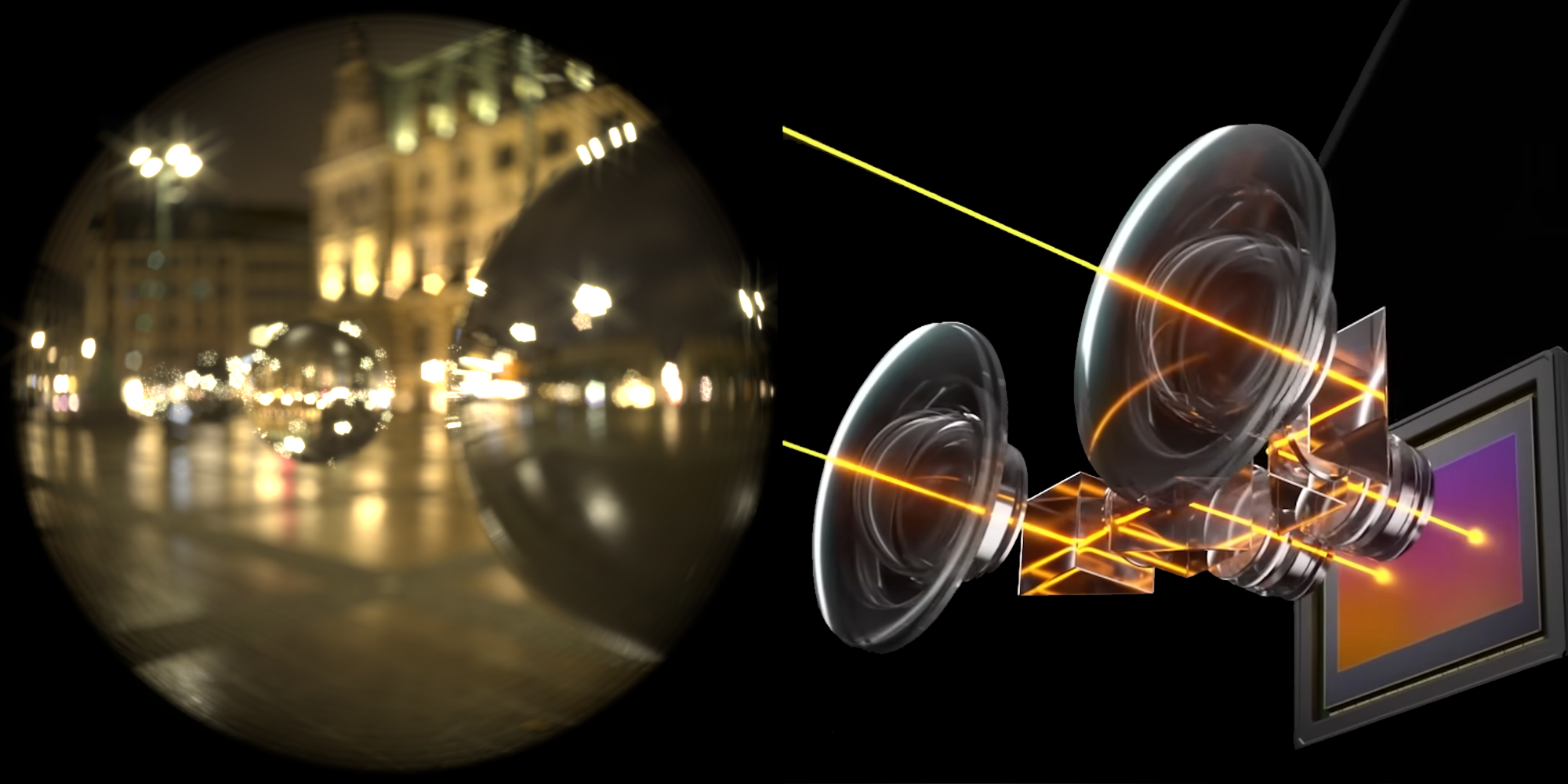
Imaging system simulation
At Fiducial, we push the boundaries of reality capture in order to apply it in the aerospace industry. The current state of the art in reality capture is moving ever more in the direction of full light field reconstruction. I explored the forward rendering part of this equation in the ETH Advanced Computer Graphics course.
View Project
Emergent Swarms
Our graduation project team got the opportunity to implement the algorithms we developed during our Bsc project into a real-world swarm of drones. We built a 40-drone swarm with real-time collision avoidance, behavior planning for 24/7 operation, inspection capabilities, and human interaction. During this project, I developed the collision avoidance and human interaction. Two members of the team are taking this project further as a startup called Emergent Swarms.
View Project
Swarm of Aircraft Inspection Drones
I developed a simulation of an aircraft inspection performed by a swarm of drones. This simulation included full 6DOF drone kinematics, outer loop drone control, drone camera simulations, pathfinding, and collision avoidance. The project was awarded the 2500 euro NLF Aerospace WO Technical Award.
View Project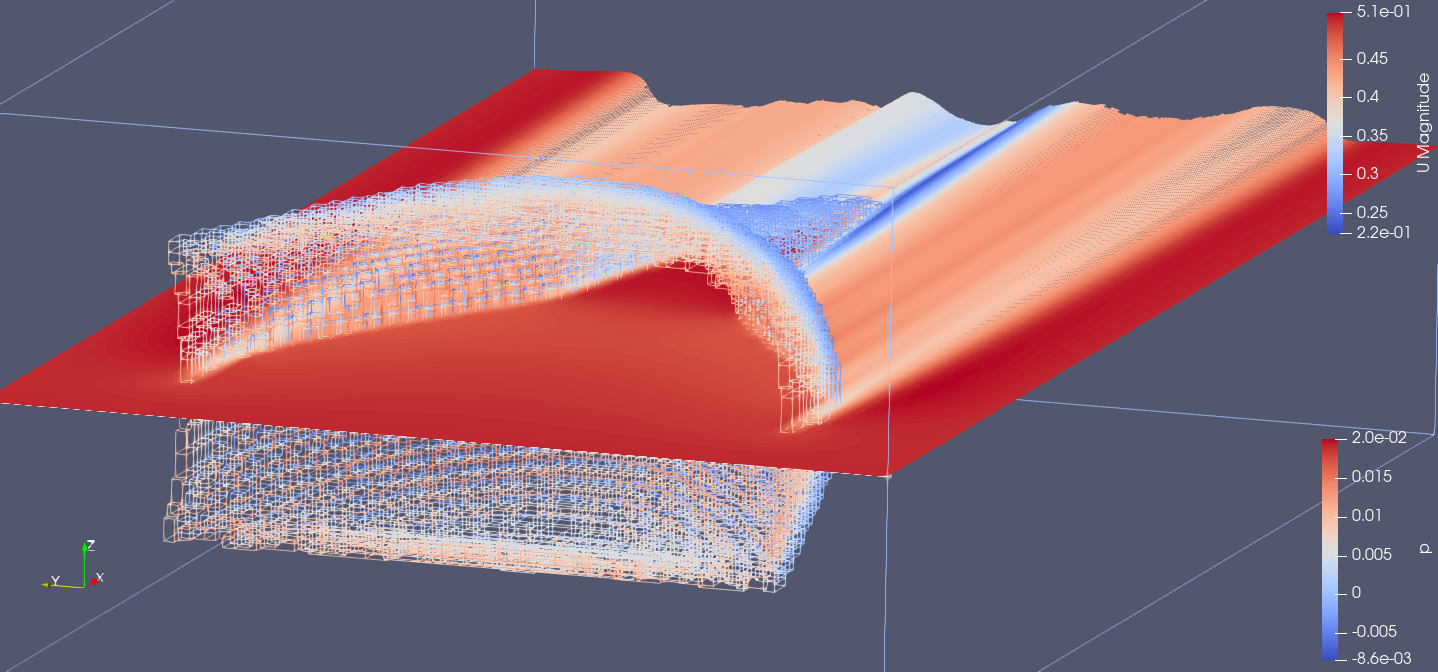
Numerical modelling of fishing nets
I implemented a fluid simulation in OpenFOAM to numerically model submerged fishing nets using a two-way non-linear cloth simulation.
View Project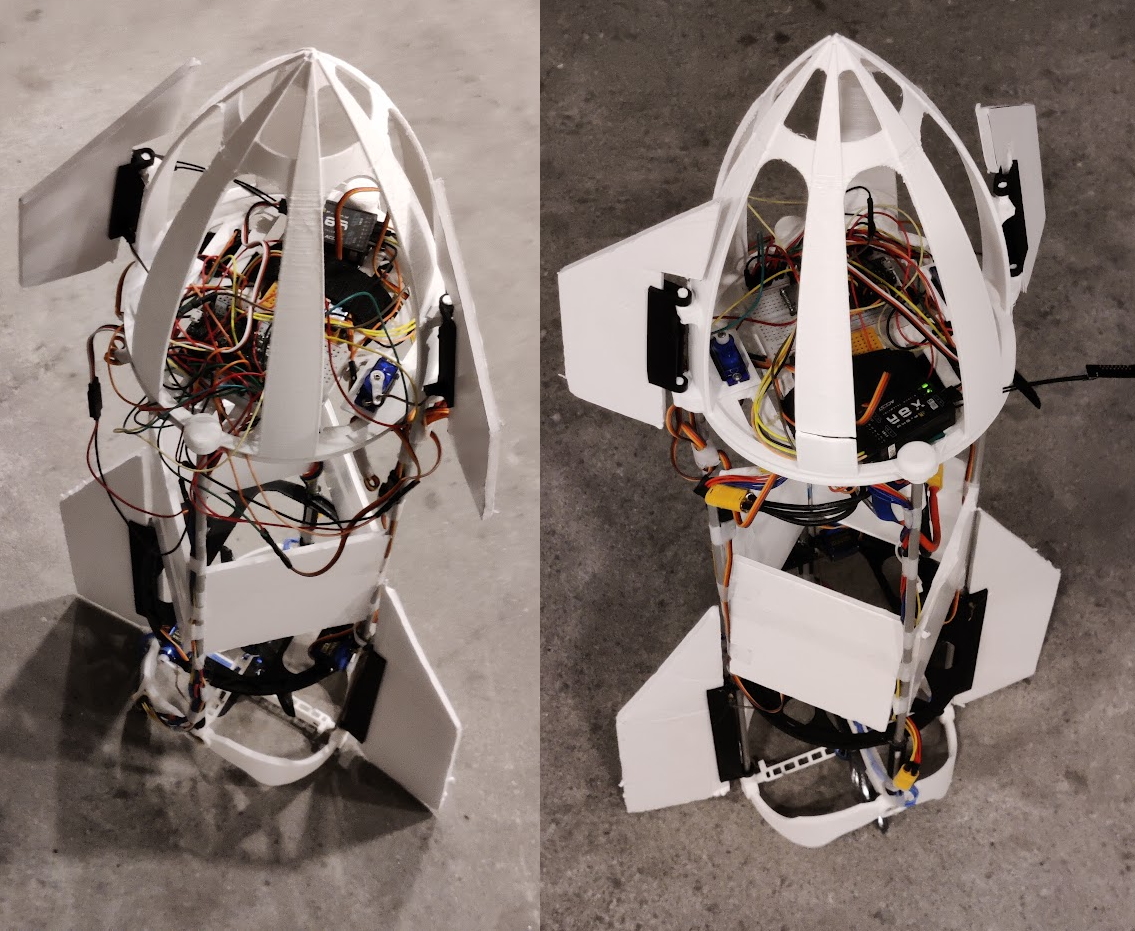
Starship Thrust Vector Controlled drone
Lennart Bult and I are designing and building a thrust vector controlled drone to autonomously replicate the flight profile of a Starship test flight, including the belly flop and landing. The drone is controlled using a gimballed counterrotating propeller setup. For indoor positioning, we developed our own camera triangulation system. We are currently working on an outer-loop control system, simulation and validation of the belly flop maneuver, and the aerodynamic design of the drone.
View Project